(16-681 & 16-682; Spring ’25 – Fall ’25) – PROJECT OUTCOMES |
||||||
|---|---|---|---|---|---|---|
| TEAM | PROJECT TITLE | VIDEOS | PICTURES | REPORT | POSTER | PROJECT WEB-LINK |
| AnyWill (A) | Autonomous Wheelchair |  |  |  |  | Visit Site |
| BASTI (B) | Broad Area Support for Triage and Identification |  |  |  |  | Visit Site |
| SNAAK (C) | Smart Nutritional Automated Assembly Kiosk |  |  |  |  | Visit Site |
| KNEEpoleon (D) | Augmented Reality and Robot assisted Total Knee Arthroplasty |  |  |  |  | Visit Site |
| VADER (E) | Vision-based Autonomous DExtrous Reaper |  |  |  |  | Visit Site |
| ZenAvatar (F) | Humanoid Loco-Manipulation for Tote Logistics |  | 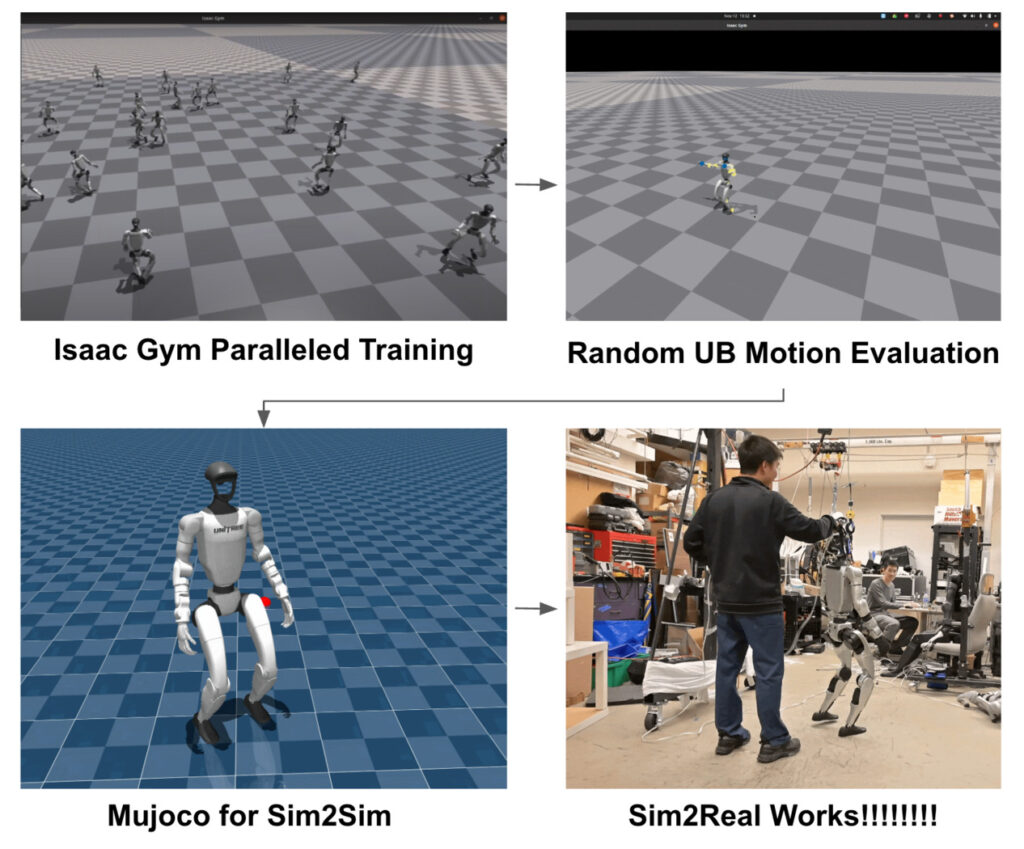 |  |  | Visit Site |
| SMoRes (G) | Searching while Modeling the Environment for Time-critical Rescues |  |  |  |  | Visit Site |
| MAGIC (H) | Multi-Agent Geometric Inspection and Classification |  |  |  |  | Visit Site |
| Lunar ROADSTER (I) | Robotic Operator for Autonomous Development of Surface Trails and Exploration Routes | 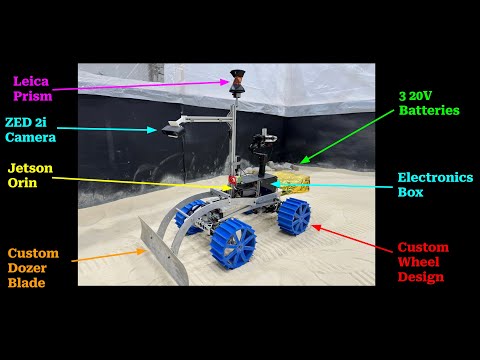 |  |  |  | Visit Site |
Project Course Class of 2025Alex Krause2026-02-16T12:49:50-05:00