(16-681 & 16-682; Spring ’24 – Fall ’24) – PROJECT OUTCOMES |
||||||
|---|---|---|---|---|---|---|
| TEAM | PROJECT TITLE | VIDEOS | PICTURES | REPORT | POSTER | PROJECT WEB-LINK |
| CreoClean (A) | Automatic Drip Pan Cleaner |  |  |  | 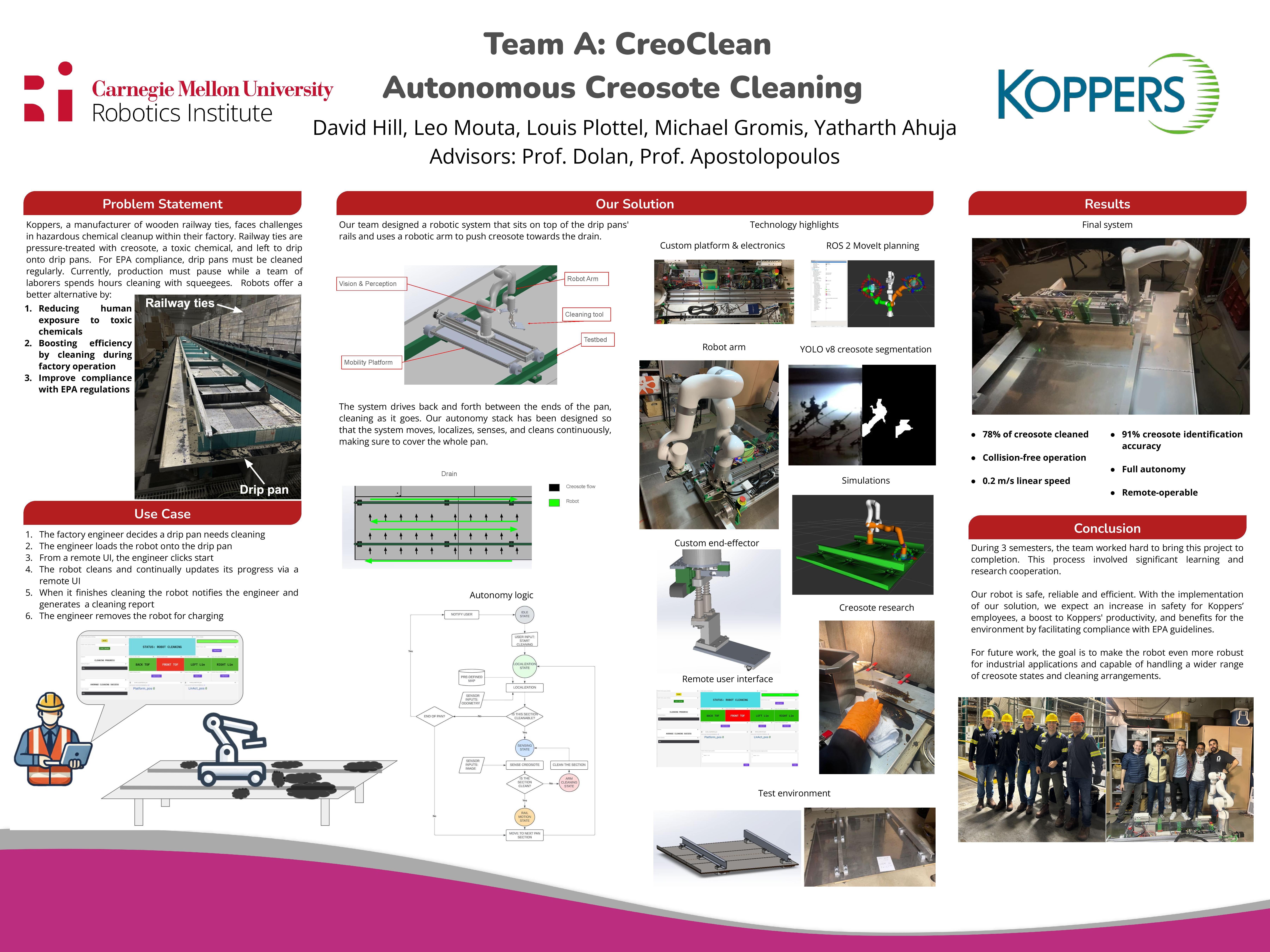 | Visit Site |
| EmberEye (B) | Subcanopy Wildfire Monitoring |  |  |  | 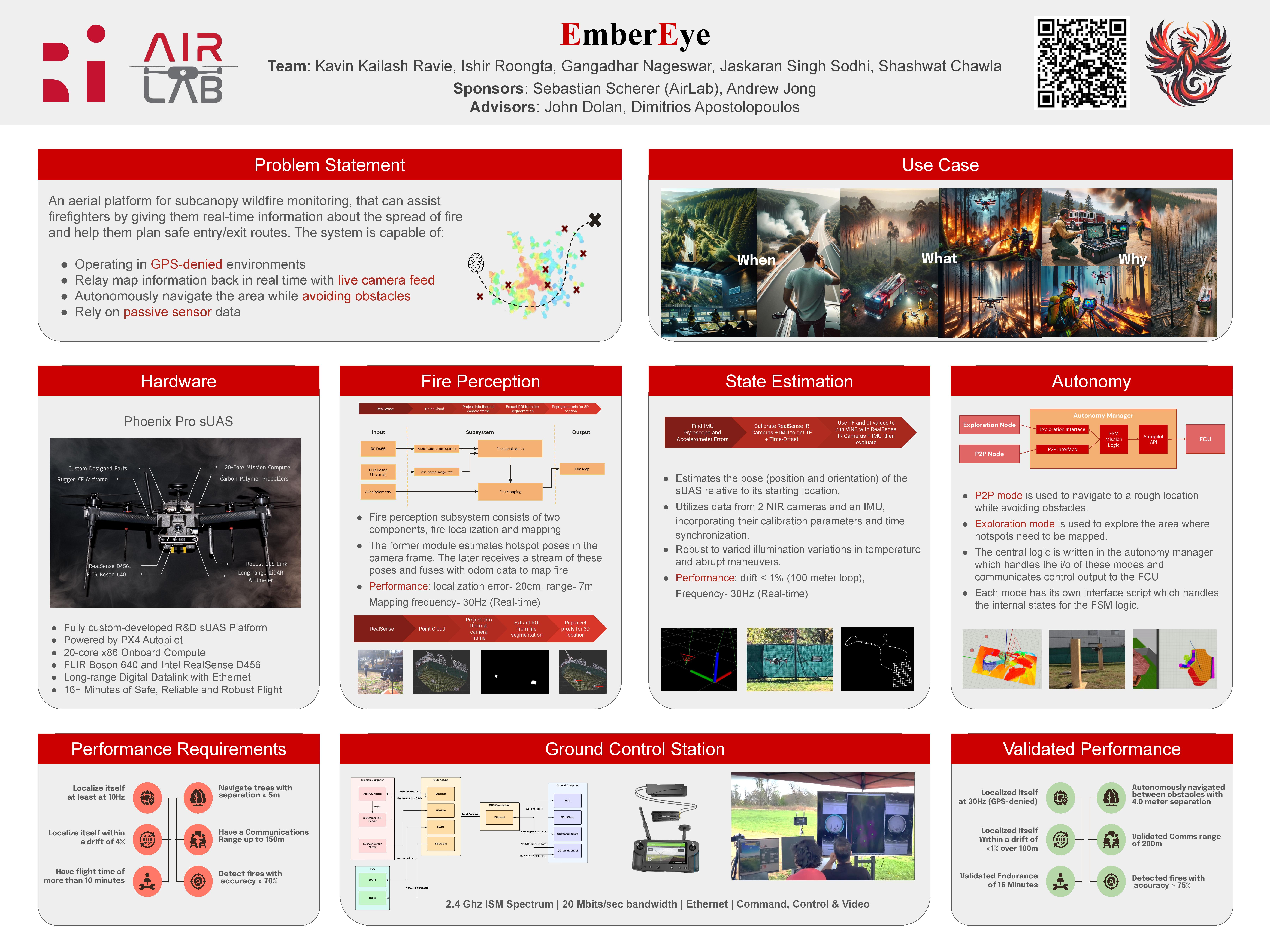 | Visit Site |
| PERCIV (C) | Precise Teleoperation Using External Perception |  | 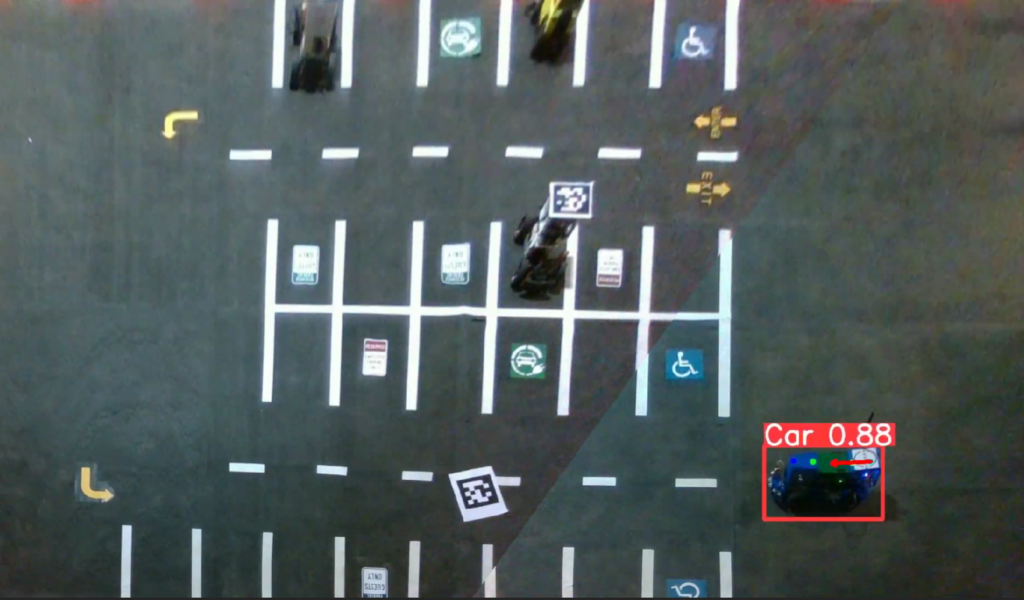 |  | 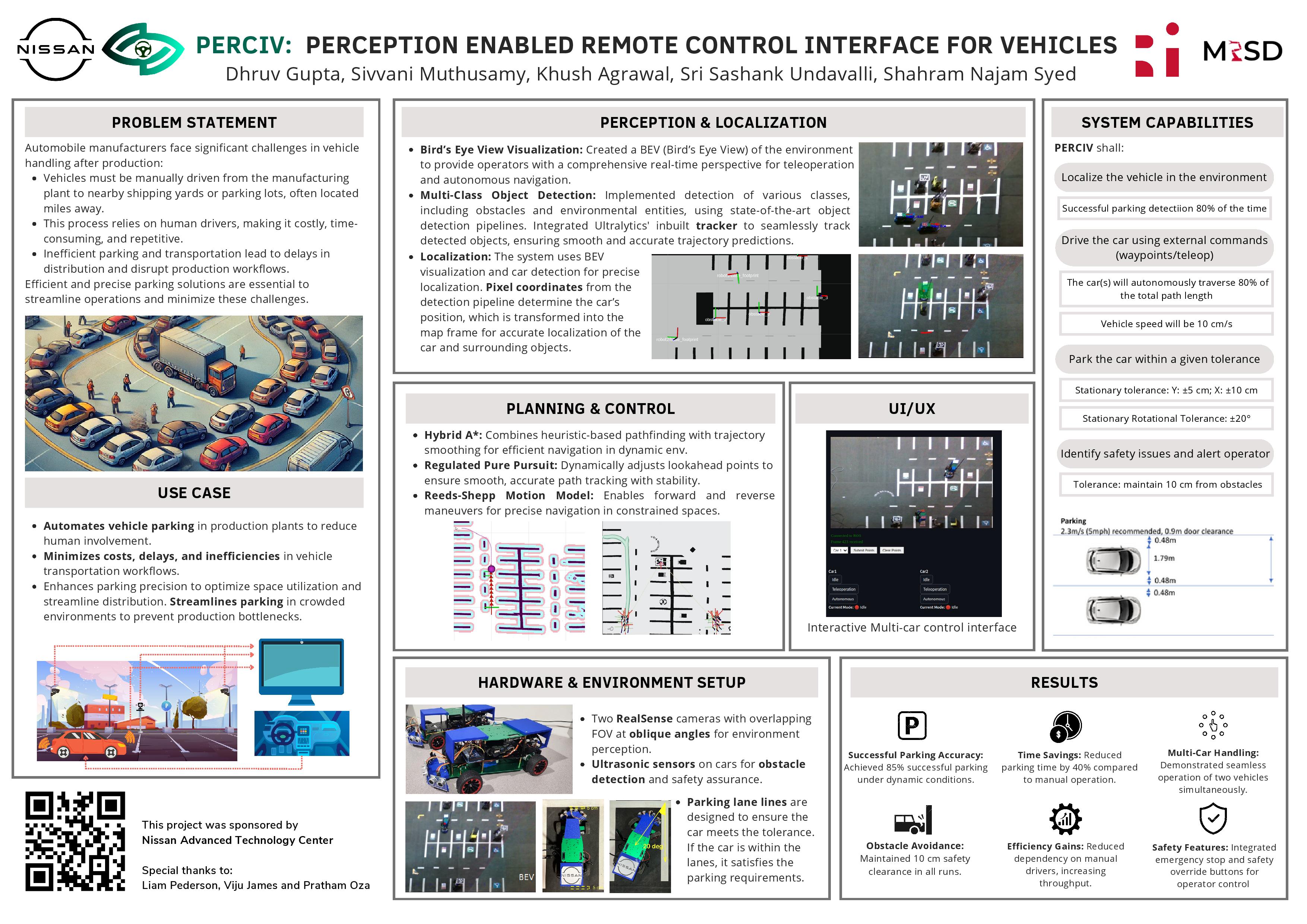 | Visit Site |
| NiMo (D) | Autonomous Nitrate Monitoring in Cornstalks |  |  |  | 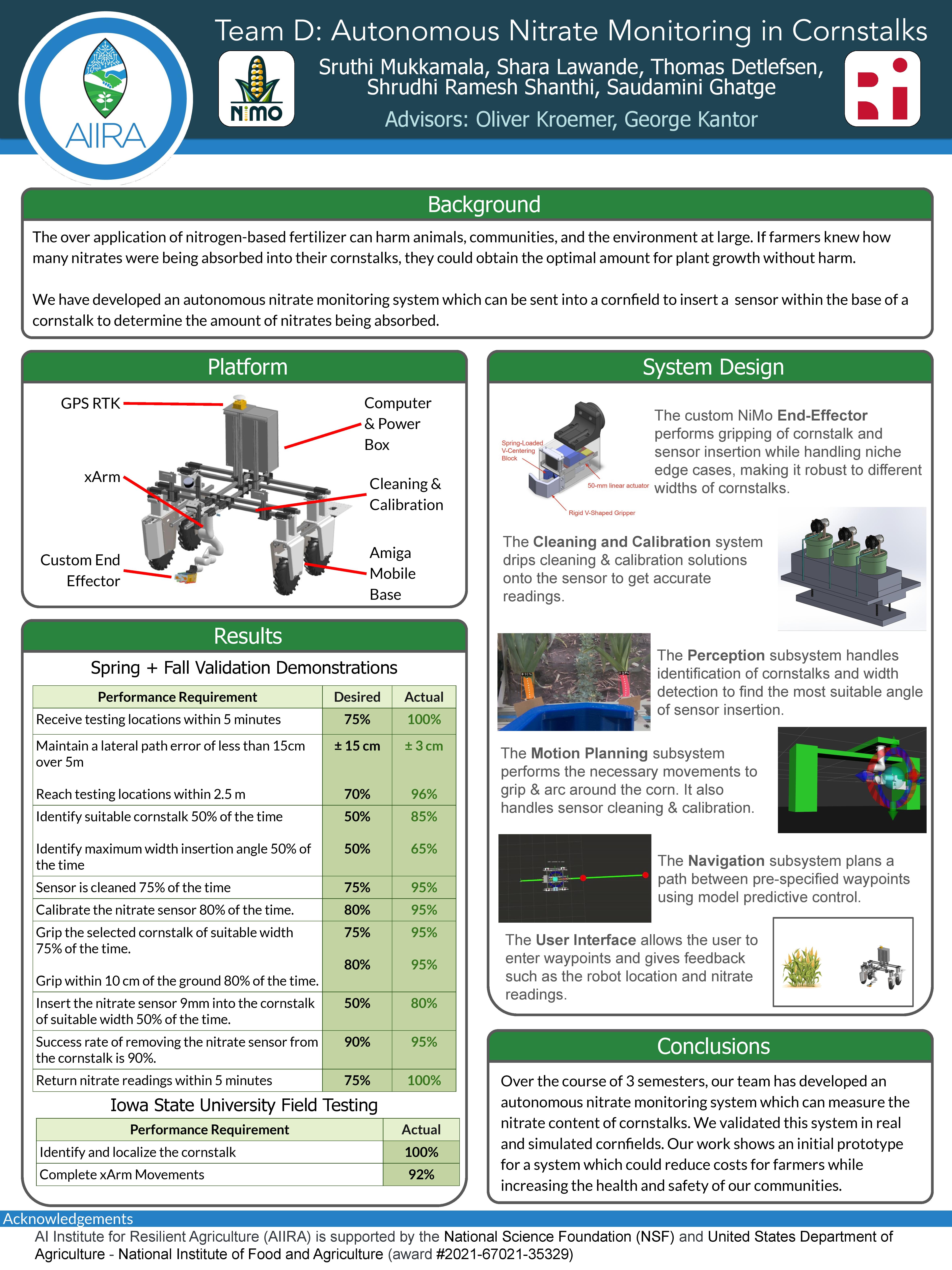 | Visit Site |
| ParaDocs (E) | Surgical Robot for Orthopedics |  |  |  | 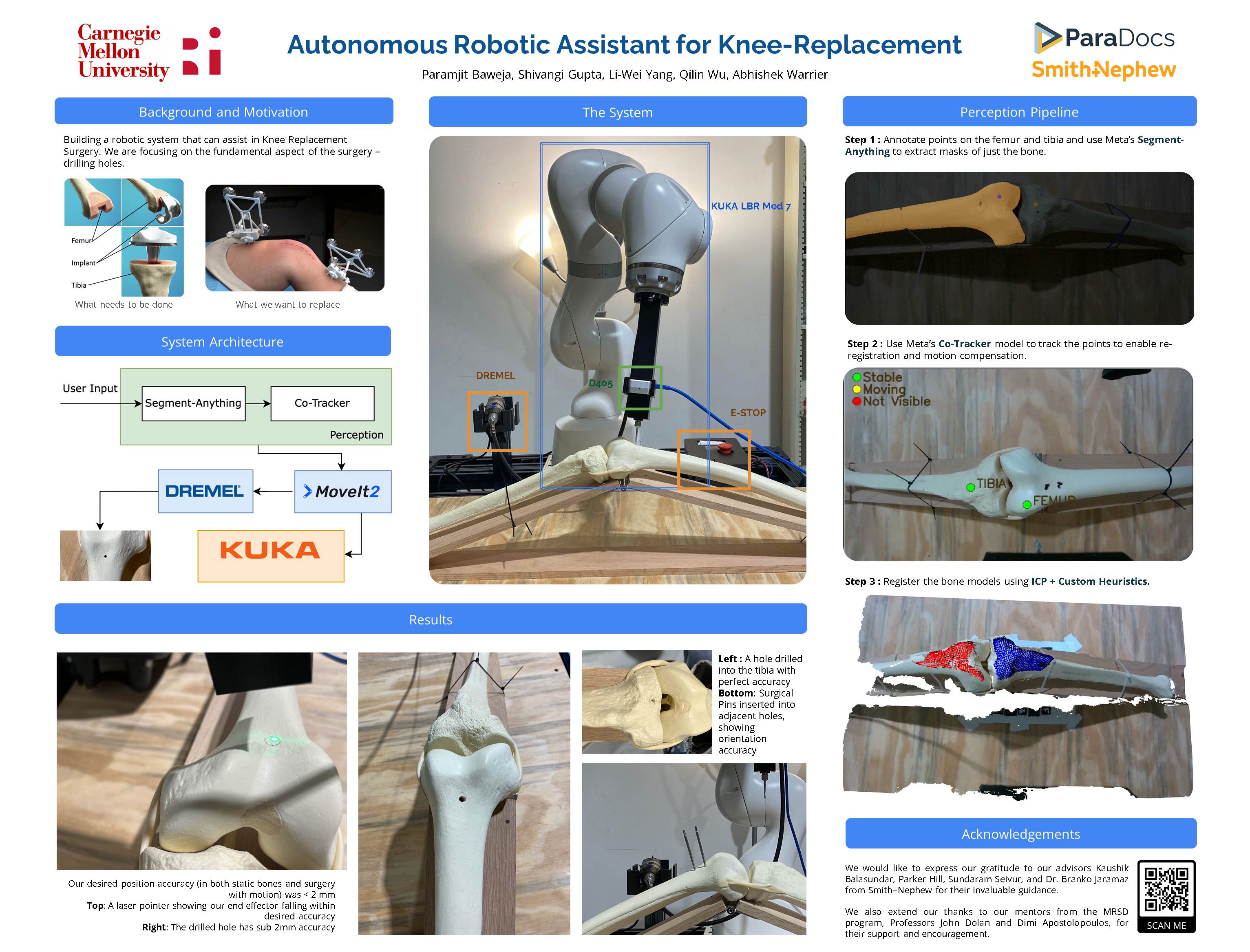 | Visit Site |
| ZAAPP Robotics (F) | Precisely Weeding Tree Nurseries Autonomously |  |  |  | 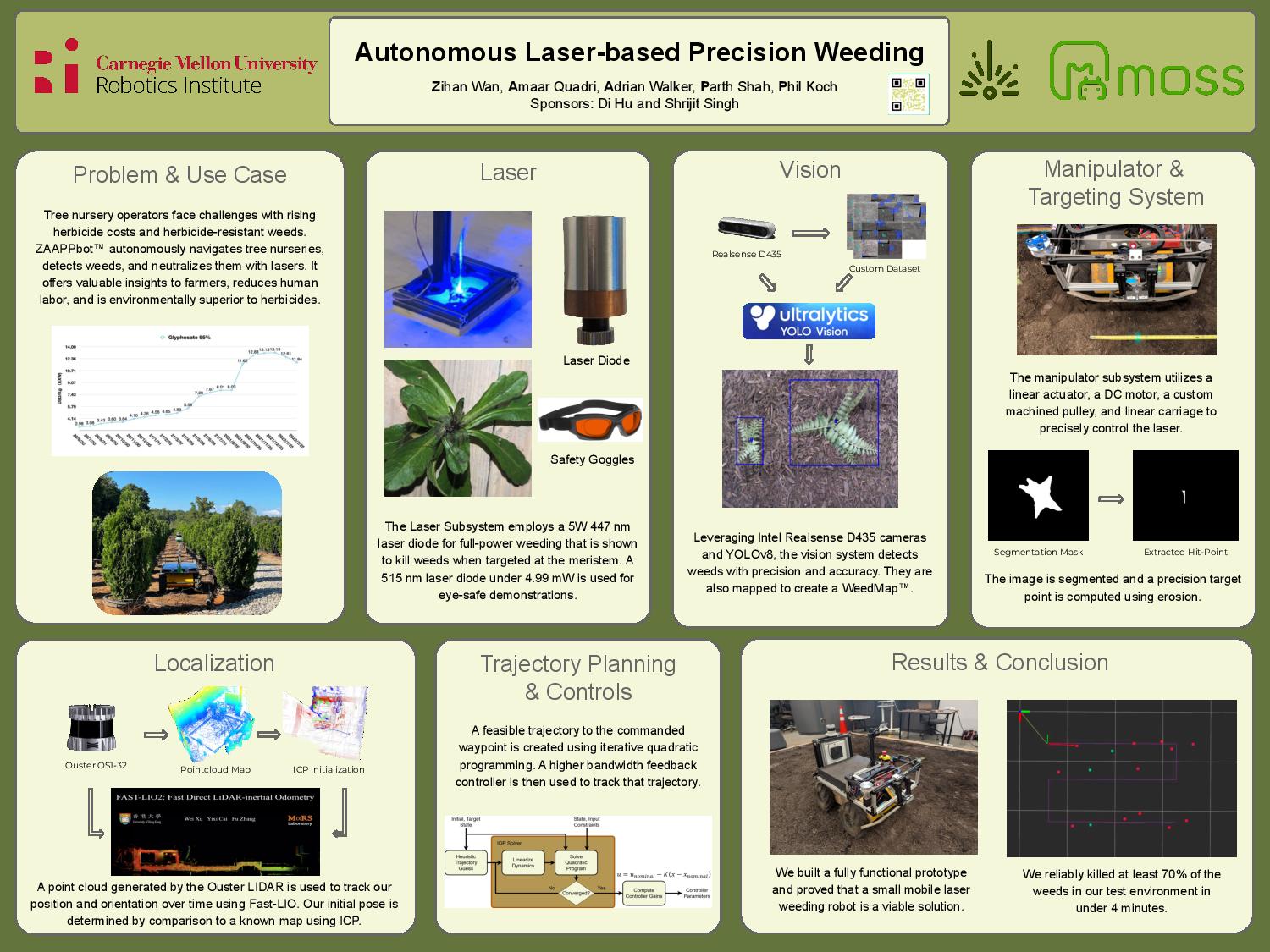 | Visit Site |
| Sputnik (G) | Driving a Photo-Realistic Full-Body Avatar using a Drone |  |  |  | 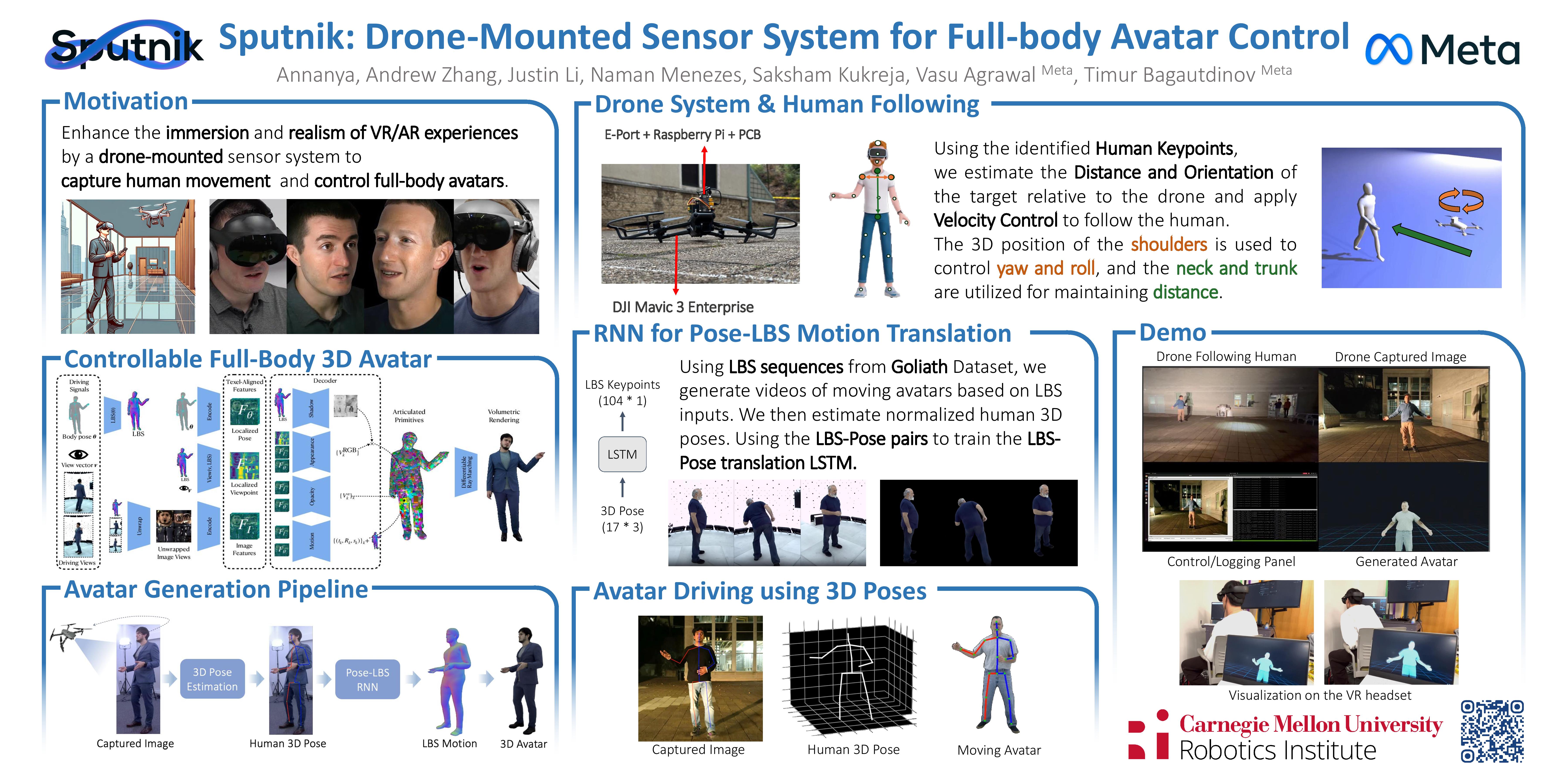 | Visit Site |
| Arbor Robotics (H) | Reforestation Robot |  |  |  | 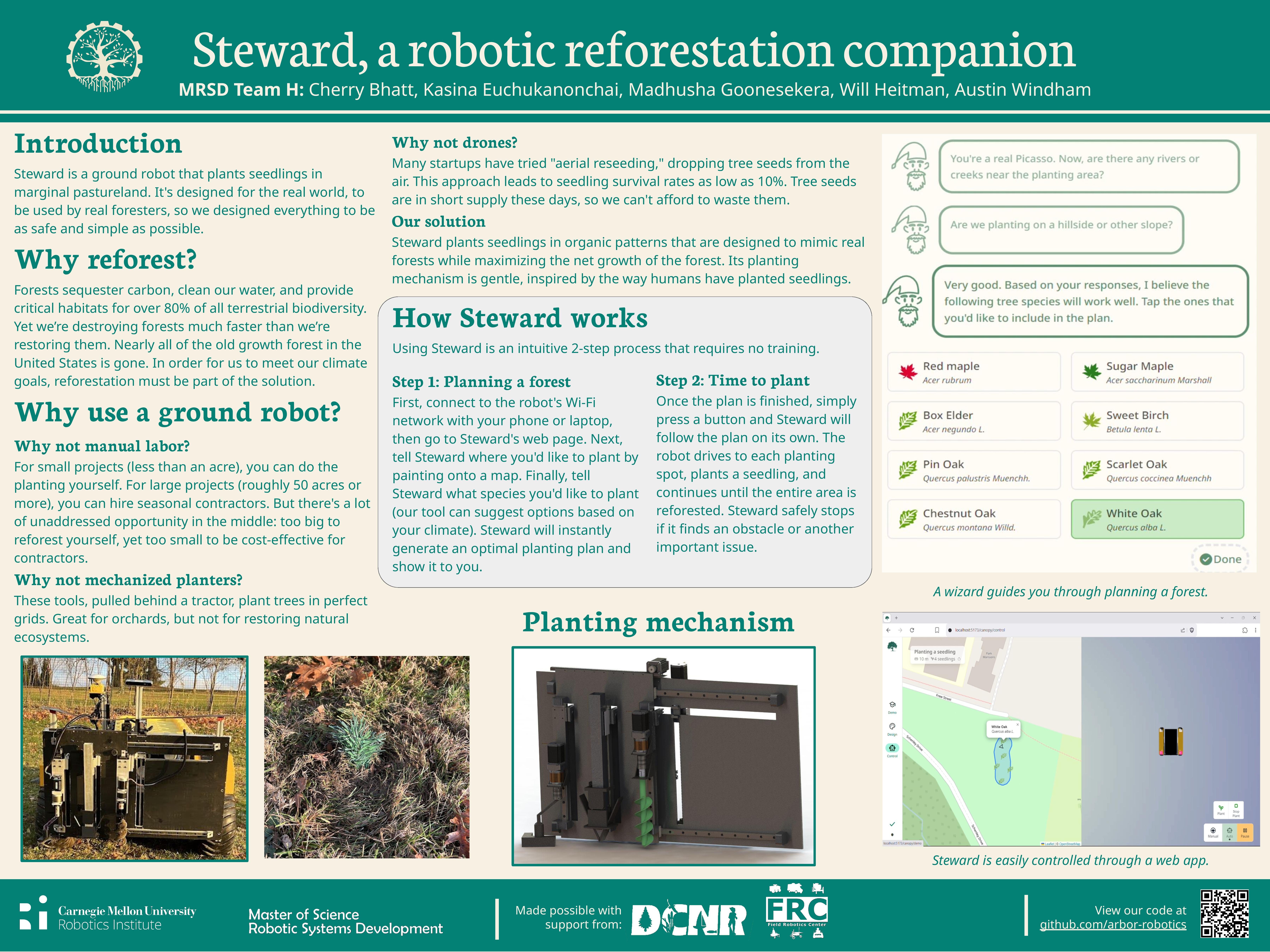 | Visit Site |
| ORBITER (I) | Operating Room Logistics Robot |  |  |  | 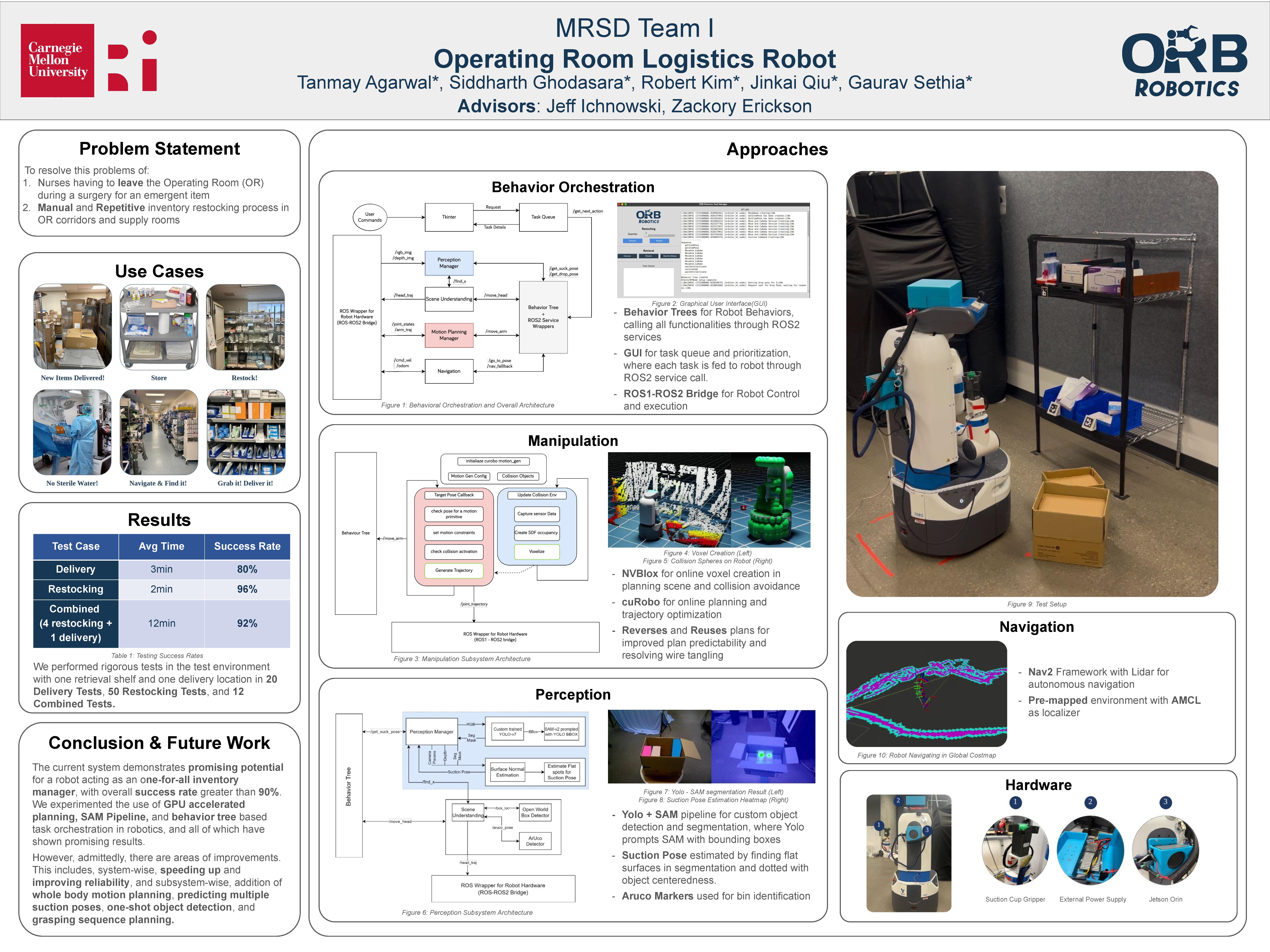 | Visit Site |
Project Course Class of 2024Alex Krause2025-01-16T14:07:52-05:00