(16-681 & 16-682; Fall '16 - Spring '17) – PROJECT OUTCOMES |
||||||
|---|---|---|---|---|---|---|
| Team | Project Title | Videos | Pictures | Report | Poster | Web-Link |
| Team Aware (A) | Perception System Using Stereo Vision and Radar |  | 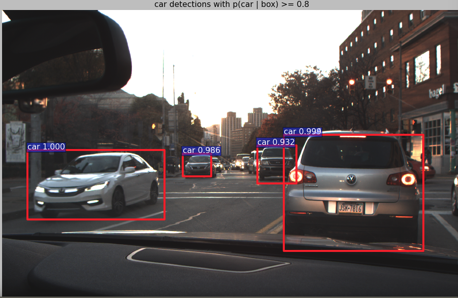 | 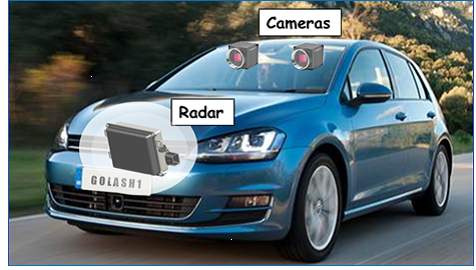 | 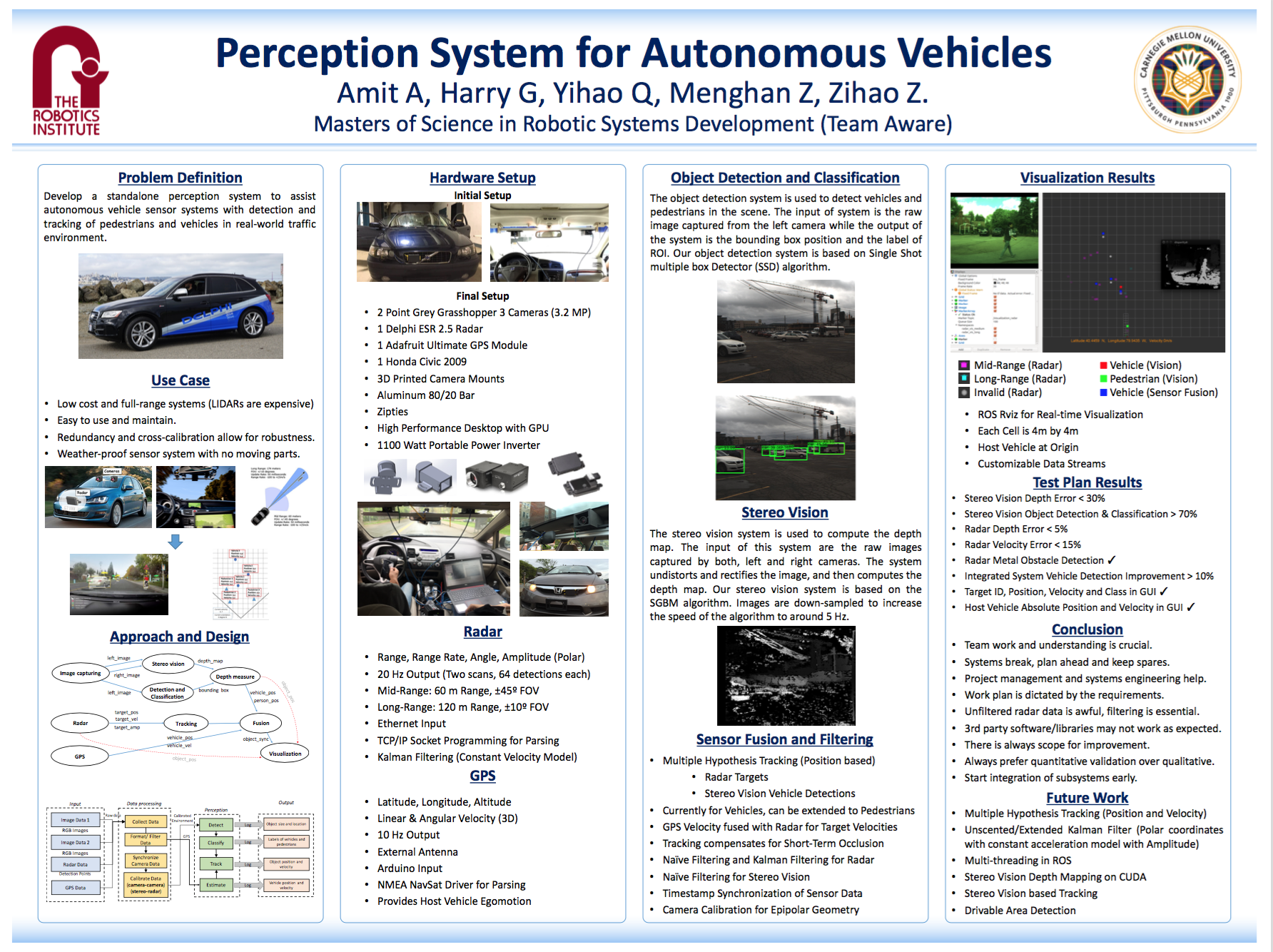 | homepage |
| Arcus (B) | Multi-Modal Mapping with Aerial Vehicles |  | 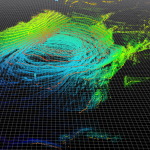 | 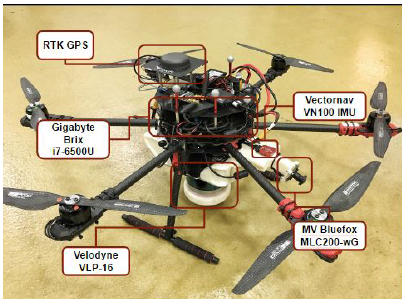 | 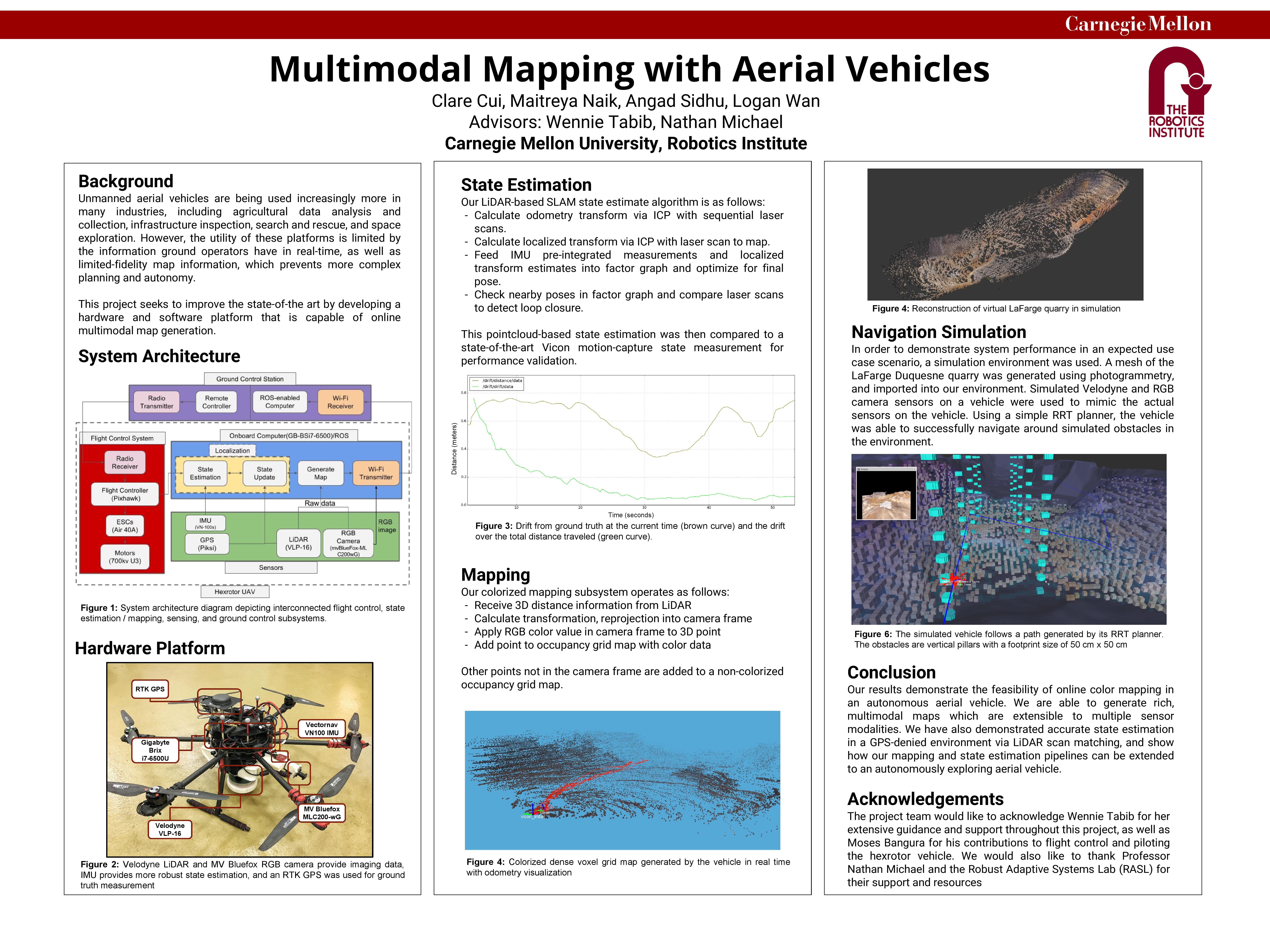 | homepage |
| MELL-E (C) | Mobile Robot for Outdoor Litter Pick-Up |  |  |  | 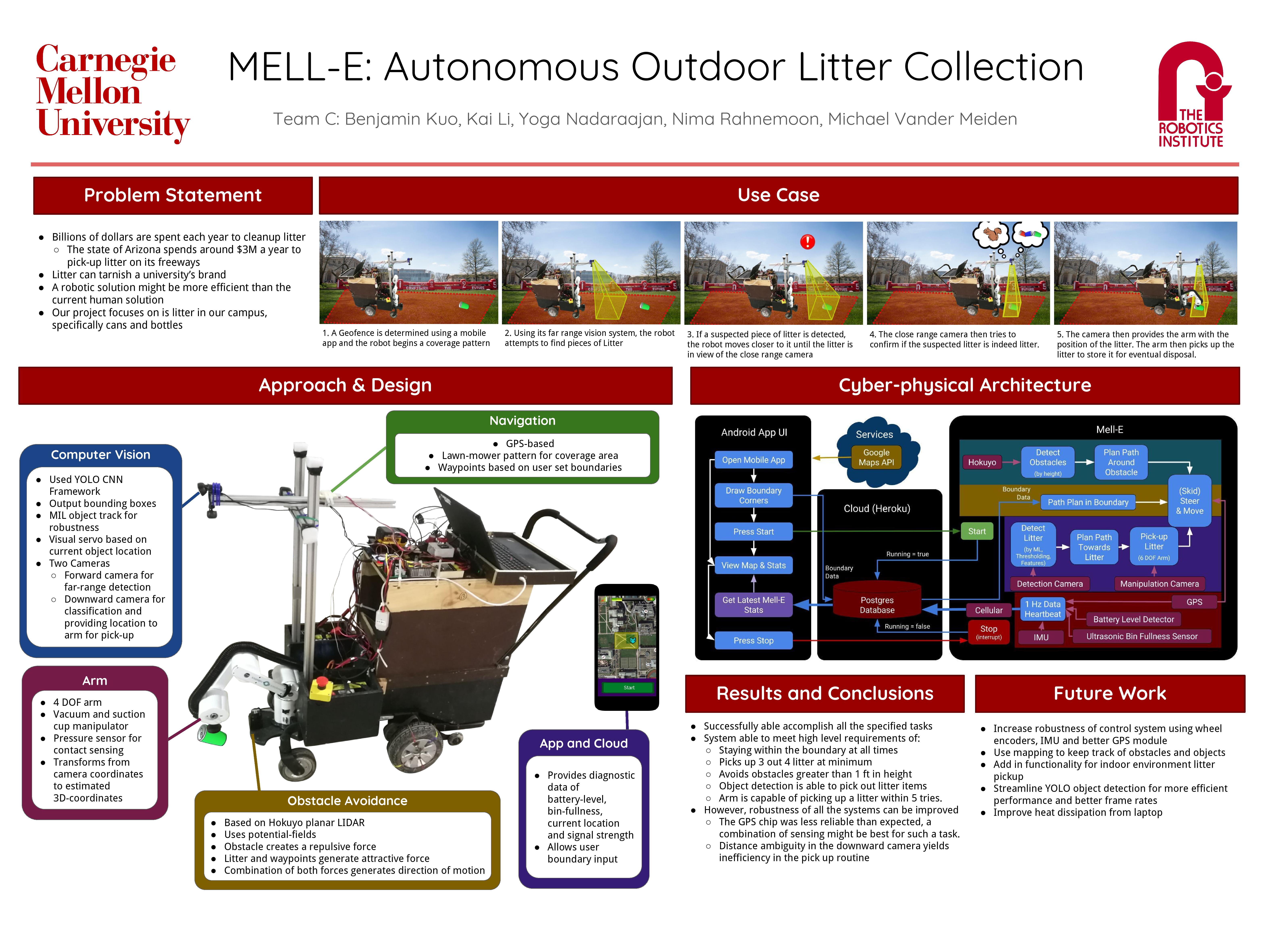 | homepage |
| LoCo (D) | Complex Maneuvers for Autonomous Vehicles |  |  |  | 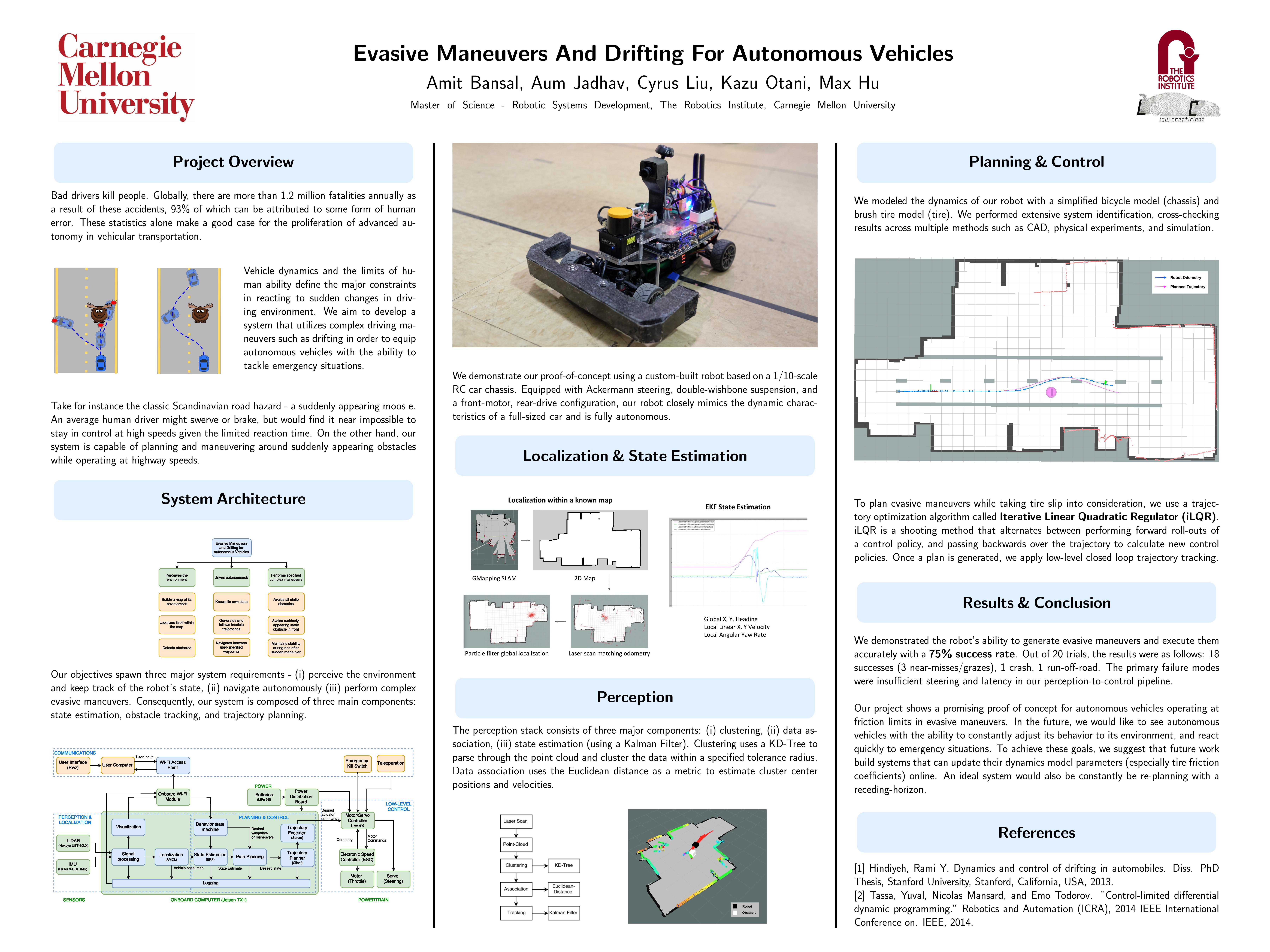 | homepage |
| Team PLAID (E) | Amazon Picking Challenge |  |  |  | > | homepage |
| Rescue Rangers (F) | Aerial Assistance for Search and Rescue |  |  |  | 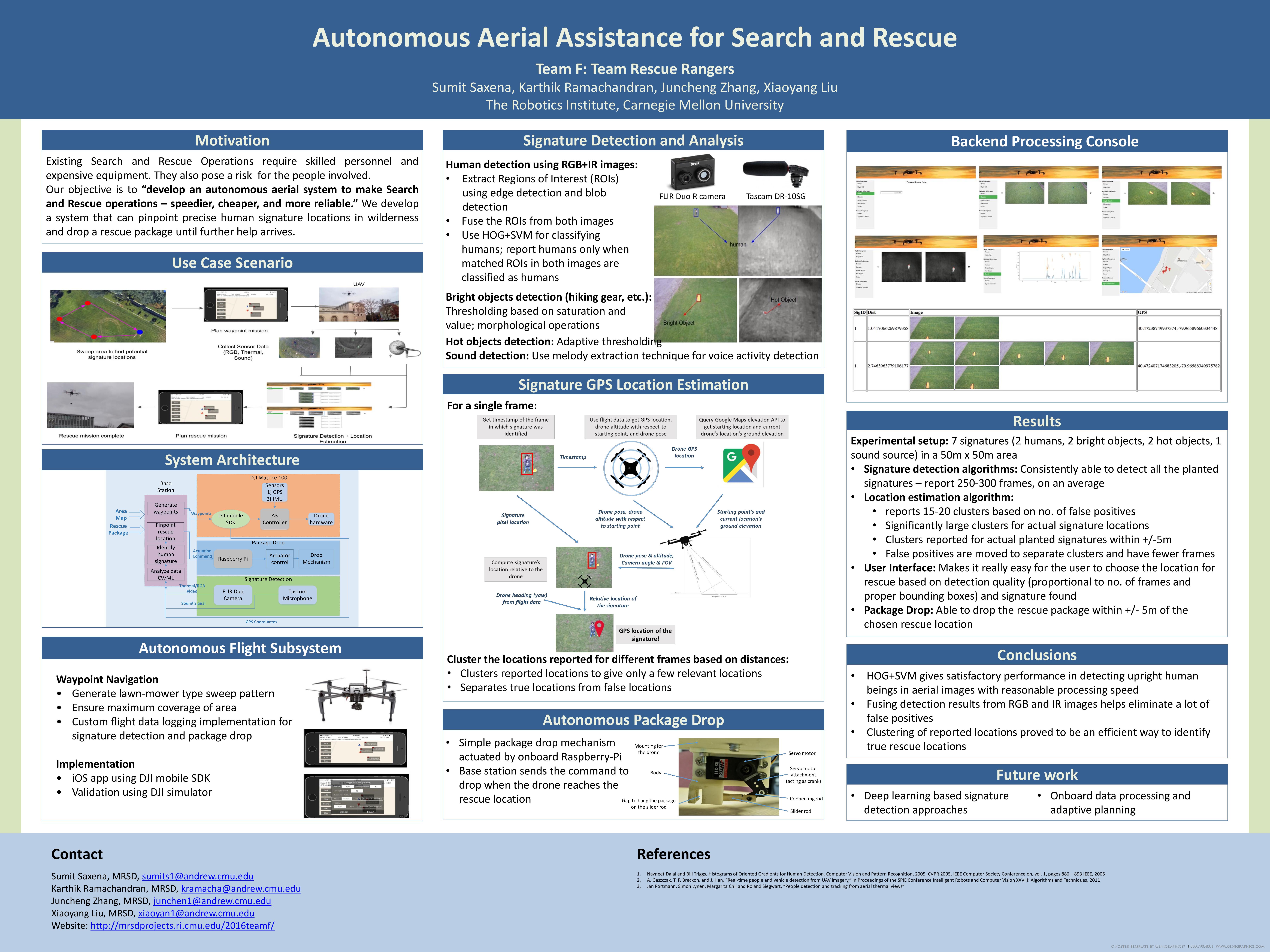 | homepage |
| ExcalibR (G) | Robotic Calibration of Multi-Sensor Capture System | 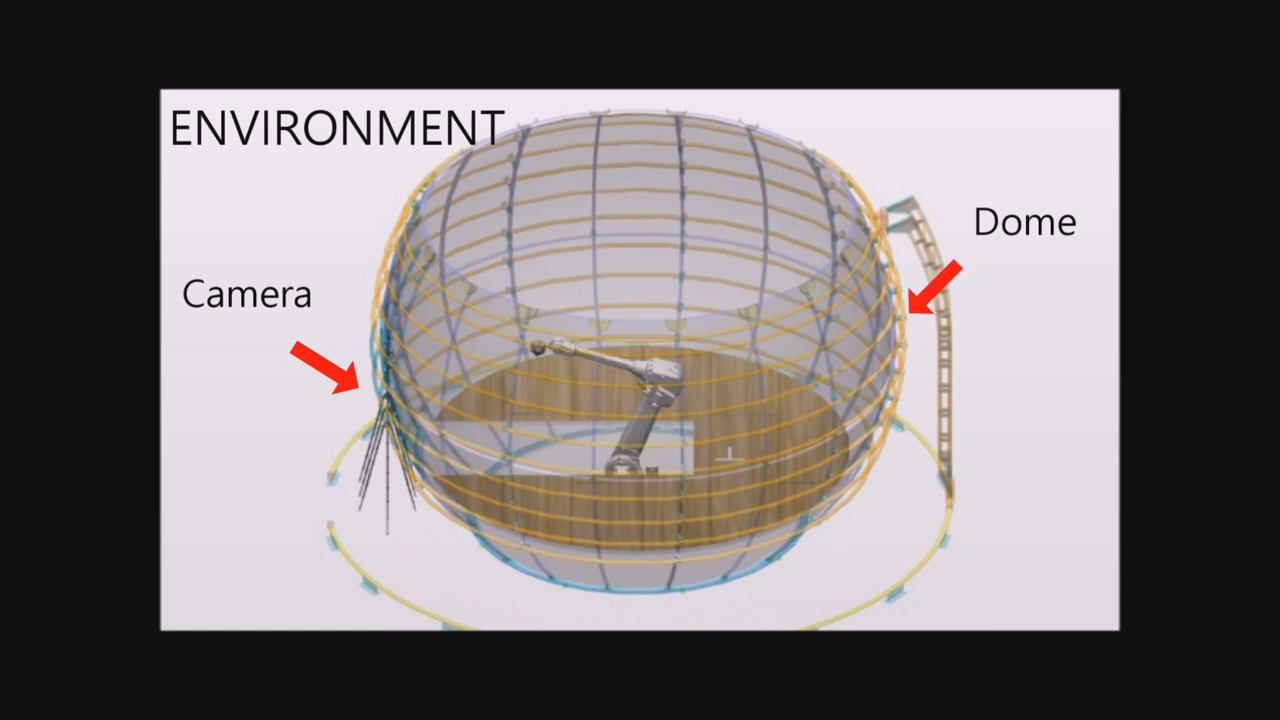 |  | 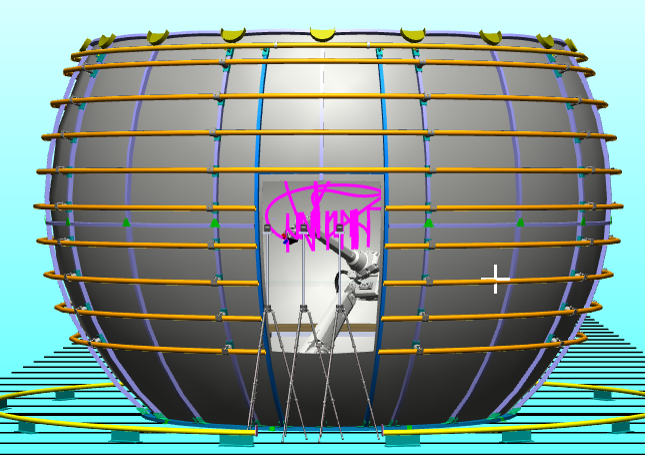 | 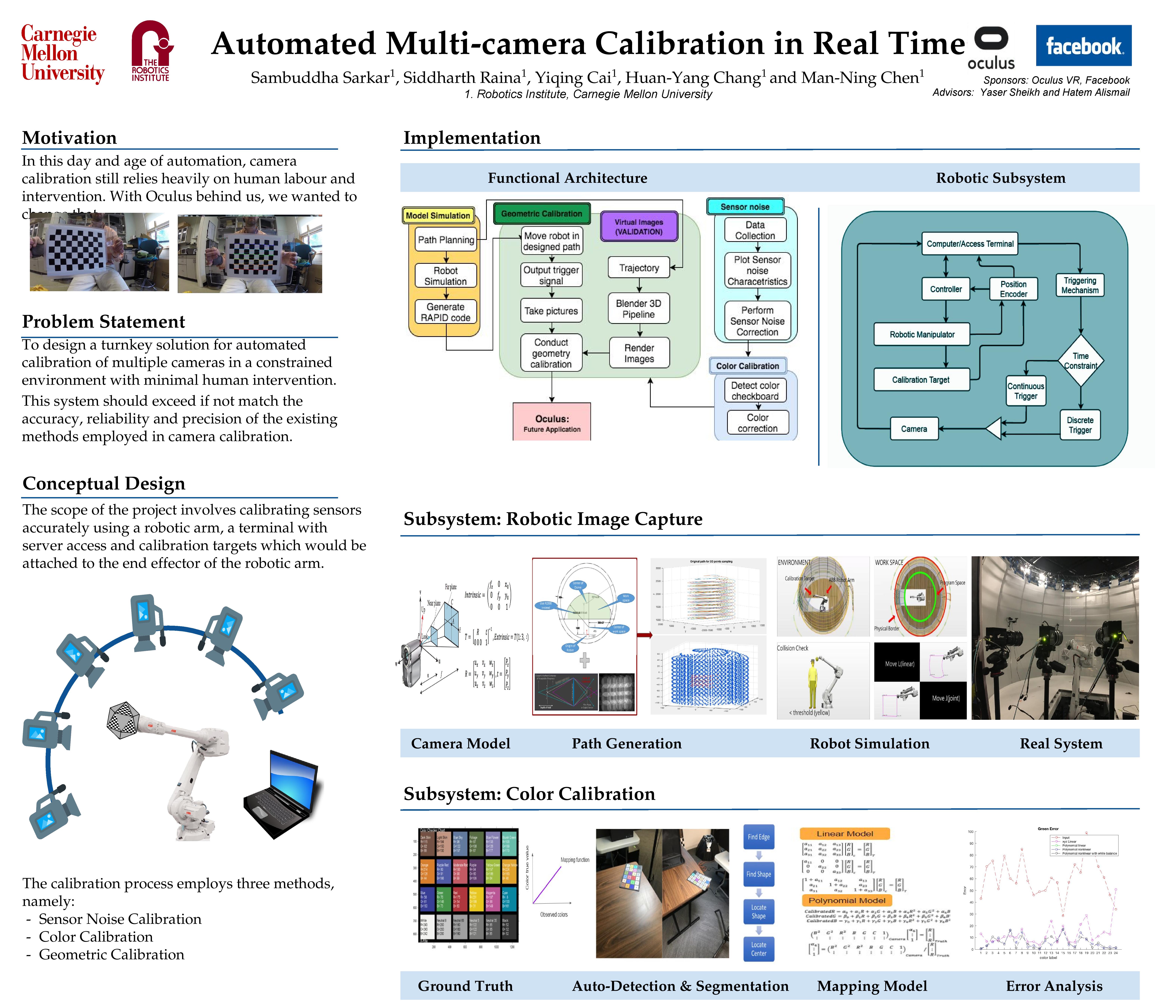 | homepage |
| MORPHEUS (H) | Stepping Stones - Intuitive Virtual Reality and Teleoperation System |  |  |  |  | homepage |
| SoyBot (I) | A UTV for Agricultural Crop 3D Reconstruction |  |  |  | 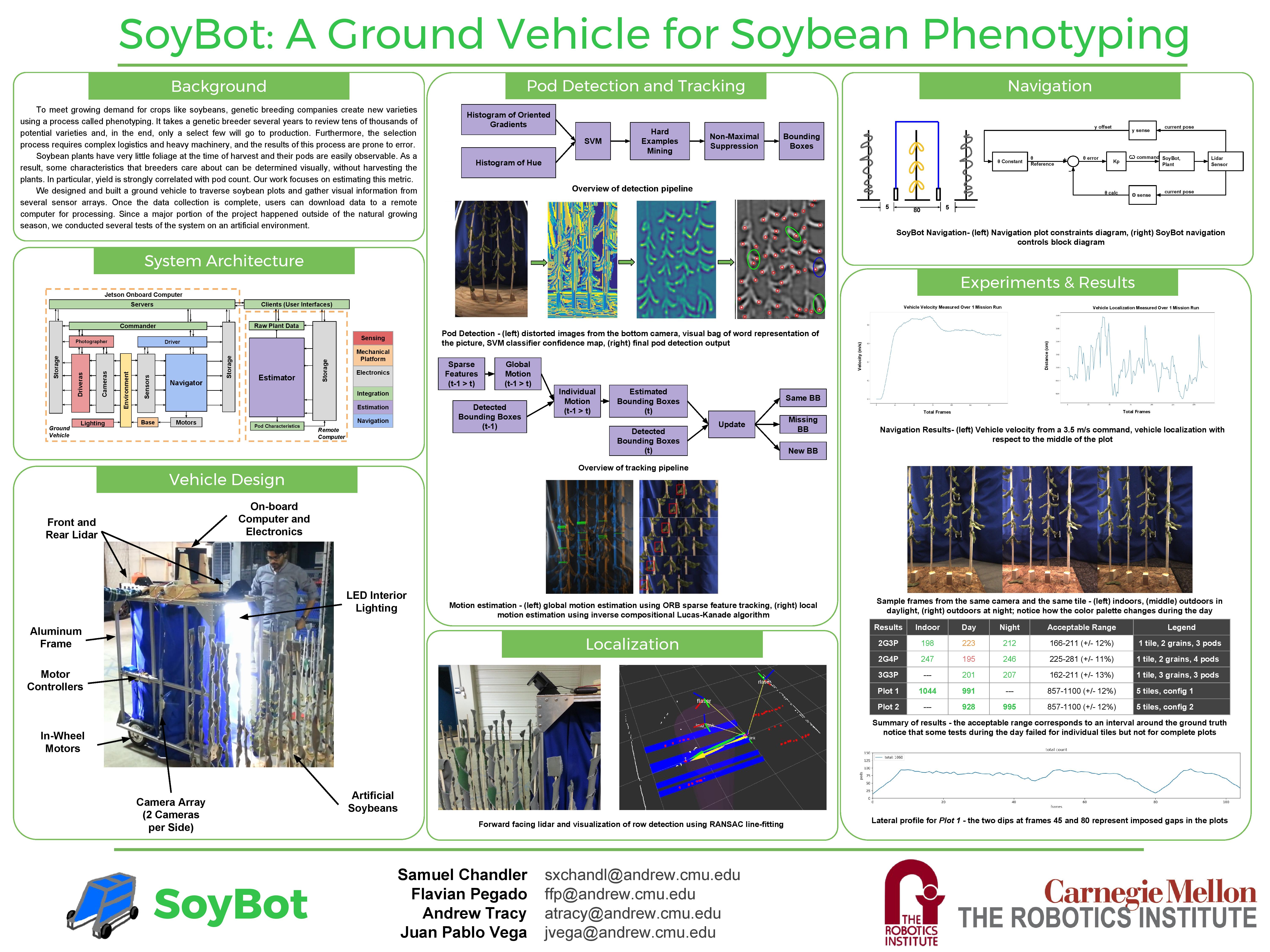 | homepage |
Project Course Class of 2016-2017Alex Krause2021-09-09T14:44:41-04:00